
Fonctionnement du train à sustentation électromagnétique
1) La lévitation
Il existe deux types de train à sustentation magnétique dont la manière de léviter est différente. Nous avons d'un côté le transrapid et de l'autre le Maglev. Le Transrapid est d'abord un monorail qui lévite par attraction à l'aide d'électroaimants. Contrairement au Maglev, qui circule en lévitant par répulsion et attraction dans une voie en "U" à l'aide d'électroaimants supraconducteurs.
a) Le Maglev
La société développant le Maglev est la société de transport ferroviaire japonaise, Japan Railways.Le type de Maglev auquel nous allons nous intéresser est le MLX 01. Ou plus exactement celui qui, en 2003, a battu le record de vitesse des trains. Ce train circule sur une voie en « U » formé d'une surface entourée de deux murets longeant toute la ligne et contenants des électroaimants. Le train lui-même contient des électro-aimants qui sont eux aussi supraconducteurs permettant une optimisation de l’énergie consommée.
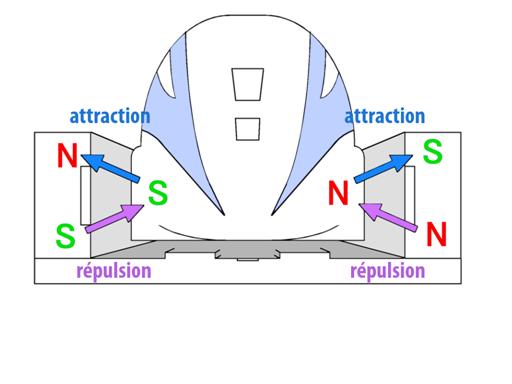
La lévitation du Maglev, nécessite, à droite sur le bas des murets, un électroaimant de pôle identique à celui du côté droit du train et en haut du bord droit de la rame, un aimant d’orientation contraire à celui du côté droit du train. L’aimant du bas repousse donc celui dans le train tandis que celui du haut l’attire.
Ce double phénomène d'attraction et de répulsion n'a un effet complet qu'à une vitesse avoisinant les 150 km/h. En dessous de cette vitesse, des roues placées dans la bogie permetttent de supporter le train, car celui-ci ne peut léviter. Le principe de lévitation magnétique n'a alors que la fonction d'alleger le train, le principe de propulsion magnétique lui est le seul moyen utilisé pour faire avancer le train.
Pour que le train puisse léviter, il faut que la force magnétique compense la gravité. Un centimètre suffit mais pour cela il faut une force de 4.2 Tesla. Pour s’imaginer ce que cette force représente, la force d’attraction de la terre est de 4*10^-5 tesla et celle d’un aimant entre 10^-2 et 10^-1 tesla.
Le tesla est une unité de densité de flux magnétique : 1 T = 1kg⋅A-1⋅s-2.
Modélisation de la lévitation du JR-Maglev
b) Le Transrapid
Le Transrapid désigne en général tous les trains développés par la firme Transrapid, filliale du groupe métallurgique Thyssen-Krupp. Comme le Maglev, nous allons nous intéresser à un modèle assez récent le Transrapid-08.
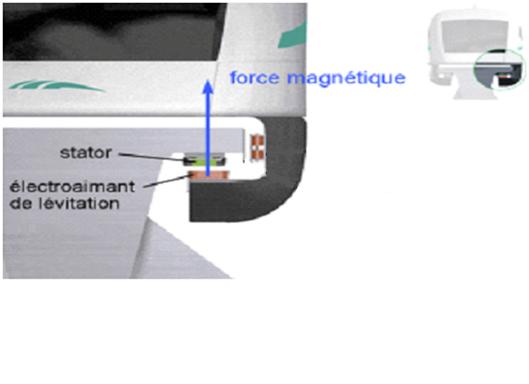
A l’inverse du Maglev, ce train lévite strictement par attraction. Un électroaimant est placé sur la partie inférieure du train situé en dessous du rail sur lequel il circule. Des barres de fer laminé sont placées en dessous des rails de façon qu'elles se trouvent au-dessus des électroaimants. Les électroaimants sont attirés par les barres de fer laminé sans rentrer en contact avec elles. Cela permet donc au train de léviter sans avoir de contact avec le rail. Il faut noter qu'aucun des électroaimants ne sont supraconducteurs, ce qui démarque d’autant plus le Transrapid 08 du MagLevX01.
Modélisation de la lévitation du transrapid
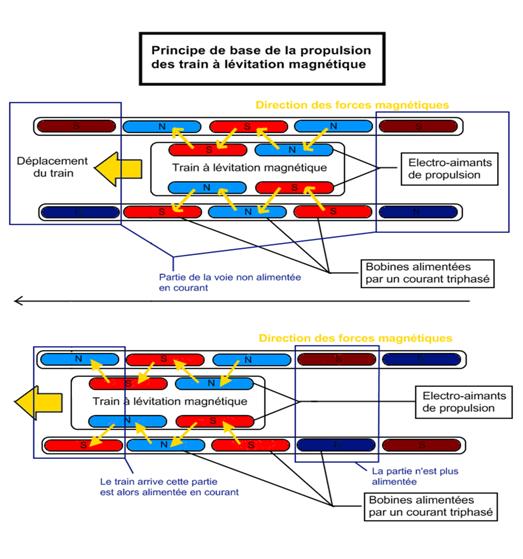
2) La propulsion
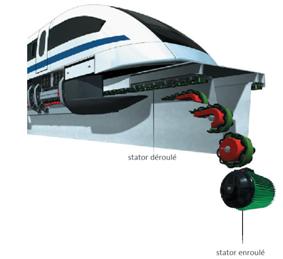
Le moteur des trains à sustentation magnétique est constitué d’un rotor et d’un stator mais qui n’ont aucun lien direct. Le stator est sur la voie. Il est constitué d’une succession de bobinages triphasés. Contrairement aux stators des moteurs, ce stator ci est déplié en longueur, il ne forme donc pas un cylindre mais une ligne. Le rotor, lui, est dans le train et se compose d’électroaimant. Le moteur est donc linéaire et non circulaire.
Modèle du stator déroulé composition du «stator»
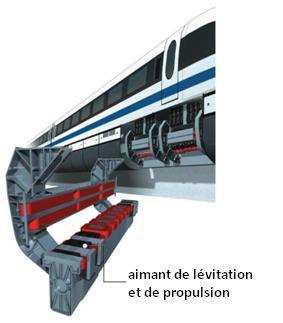
Comme le montre le schéma pour que le train avance, les pôles des électroaimants de la voie alternes attirant le train vers lui dans un premier temps puis une fois ceux-ci passé, il y a inversion des pôles et donc le train se fait repousser pendant que d’autres l’attirent de nouveau. C’est la création d’un champ magnétique de décalage. Pour le Maglev, les enroulements de propulsion se situent sur les parois latérales de la voie, ils sont alimentés par un courant alternatif triphasé. Comme la puissance des électro aimants et des bobines induit la vitesse, celle-ci est donc régulée par l’intensité du courant alternatif. Le fait que le courant soit triphasé permet seulement un apport de plus de puissance, donc une plus grande intensité de celui-ci. Mais il est aussi régulé par la fréquence du courant qu’il faut adapter en fonction de l’intensité pour faire varier de sens les pôles des aimants en fonction de la vitesse du train. Ce système est réversible : pour freiner le train, il suffit d’inverser le champ magnétique, l'énergie créé est alors récupérée pour l'alimentation du réseau.
Un aimant qui n’agit plus sur le train voit son alimentation coupé, n’utilisant donc que peu d’énergie.
Le système de guidage est composée d’une suite de bobine sur la voie et d’une bobine par côté de chaque bogie. Il est utilisé pour tourner et éviter tout frotement avec le bord de la voie. Par exemple, si le maglev veux tourner vers la droite et qu’on se situe face au sens de sa marche, le le coté droit du muret va imposé un pôle semblable à celui du train le repoussant, du côté gauche lemuret va lui imposé un pôle inverse à l’aimant embarqué l’attirant.
schéma d'une bogie de maglev
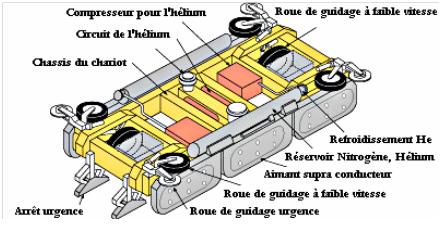
Le système de guiage est aussi composée de roue que contienne les bogies. Elles sont utilisée tant que la force des aimants n’est pas assez puissante pour guider le train. En cas d’urgence, par exemple si le train n’est plus alimenté en électricité, des roues de guidage d’urgence plus solide que les autres se mettent en place ainsi que des patins au niveau du sol.
Commentaires
-
 J'aurais pas dû regarder la section commentaire... sinon super site, c'est bien expliqué.
J'aurais pas dû regarder la section commentaire... sinon super site, c'est bien expliqué. -
 Allez checker mes sons je suis le futur Travis Scott blanc
Allez checker mes sons je suis le futur Travis Scott blanc -


-

" rel="iframe" title="Link">
-
 allez vs abo c divertissant et bite tout le monde
allez vs abo c divertissant et bite tout le monde -
 snap: munir_arf10
snap: munir_arf10
sofiane.dnh
toutouf911 -
nude
-
HEEEEEEYYYYYYYYY SALUTTOUSLESAMIS C'ESTDAVIDLAFARGEPOKEMON ET J'EPEEEEEERE QUE VOUS ALLEZ BIEN. AUJOURD'HUI ON SE RETROUVE AVEC MISS JARACHI
COUUUUUUUCOUUUUUU -
 allé voirre ma chènne jimmy podcast
allé voirre ma chènne jimmy podcast -
 venez voir ma chaine youtube c'est Mangas'Time
venez voir ma chaine youtube c'est Mangas'Time -
slt les gens
-
 WOWWWWWWWWWWWW LOOOOOOOOOLLLL J ADORE LES CASSEROLES VOLANTES CONDUITES PAR DES LUTINS QUI SE CAChENT DANS UNE MACHINE A LAVER
WOWWWWWWWWWWWW LOOOOOOOOOLLLL J ADORE LES CASSEROLES VOLANTES CONDUITES PAR DES LUTINS QUI SE CAChENT DANS UNE MACHINE A LAVER -
 wahou quelle site de ouf j'adore
wahou quelle site de ouf j'adore -
 Salut les abonnés, aujourd'hui nouveau tuto make up ou on va calculer un torseur javascript:void(0);
Salut les abonnés, aujourd'hui nouveau tuto make up ou on va calculer un torseur javascript:void(0); -
ba oui, c éviden
-
Bah pourtant c'est pas compliqué...
-
 cette technique m impressionne mai je ne pas bien compris le principe
cette technique m impressionne mai je ne pas bien compris le principe
Ajouter un commentaire


